Follow along with the video below to see how to install our site as a web app on your home screen.
Note: This feature may not be available in some browsers.
This Forum is for adults 18 years of age or over. By continuing to use this Forum you are confirming that you are 18 or older. No content shall be viewed by any person under 18 in California.
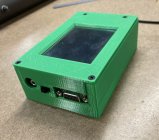
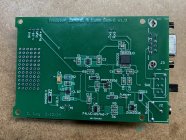
This probably would come under the category of "a day late and a dollar short" or maybe a year late! I like projects and I decided at 77 I wanted to keep my noodle active (The one at the top, not the bottom. ). I already have an FX120i and a Dandy so I thought about designing a trickler control myself. Used an Arduino Mega 2560 (copy) with a touchscreen and a communication & motor control board that I designed (I included a switch so it can use a straight through or null modem cable). Then came the code! After that I had to learn SolidWorks to design a box to put it in. I know I could have bought something but this is more fun and kept my mind busy between the frustrations.
I'm waiting for a friend to print the box. I wanted it to be as flexible as possible but maybe it's too flexible, don't know. I decided to have 4 powder types in case the flow settings would be different for each. I have Ball, Flake, Short Stick (S_Stk) and Long Stick (L_Stk). I'm using Pulse Width Modulation (PWM) to control the speed. A frequency (low by usual PWM standards) between 2 and 20 Hz can be selected for each powder type which doesn't change during trickling. I broke the speeds into 4 groups Fast (basically full speed), Medium (Med), Slow (Slo) and Very Slow (VSlo). A Duty Cycle can be selected for each of the speeds at a corresponding Delta. Meaning, when the difference between the actual weight and the target weight is equal to or less than the Delta it switches to the next lower speed (Duty Cycle).
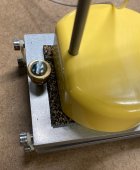
Had to add a cable to the Dandy switch control box to plug into the unit.
A few years ago I purchased an Arduino clone development kit from Amazon, which included boards, wires, motors, switches, etc for something like $65. It's amazing what these inexpensive devices can do, and the free programs which are available. Not to mention YouTube courses.
Too many distractions and other duties!! Haven't had the time to spend on this as much as I'd like. Since the 120i's last digit doesn't indicate odd numbers I modified the code so that if you tried to enter an odd number for the second decimal place for target weight it will round down one digit. i.e. if you tried to enter 21.67 it would change it to 21.66.
Right now if you want to see how the Dandy behaves (powder dispenses) with the settings you enter, you need the scale hooked up and powder dispensing so that the Deltas are being met to have the trickling speeds change. I thought I'd add a feature, entered from the Settings screen, such that you can see how the powder dispenses with the Speed settings (Duty Cycle) you enter without having the scale in the loop. This way you can immediately see how the numbers affect dispensing behavior. Now, when I get the time, I need to figure out the details. I also still have to make modifications to the box. At least I'm not staring at the walls wondering what I should be doing.
Code is DONE!! I hope. I added the feature mentioned above and made changes to the box (waiting for a re-print). Also added another page to the instructions.
When you click (touch) on ‘Fast’ on the settings screen it changes to ‘Test’ where you can click on the 4 Duty Cycle boxes and the Dandy will immediately run at that setting without the scale in the loop. It will also use the frequency stored for the powder type displayed. If you want to see the trickling behavior of the other powder type settings, click on ‘Test’ again (trickling will stop) and it will return to ‘Fast’ where you can either select a different powder type and return to Test or edit the numbers.
I realize the Dandy is a little noisy at the faster speeds (although it doesn’t bother me) but most of the time it will be only running at the slo or vslo speeds since I’ll be dropping within a couple of tenths of the target weight.
I realize the Dandy is a little noisy at the faster speeds (although it doesn’t bother me) but most of the time it will be only running at the slo or vslo speeds since I’ll be dropping within a couple of tenths of the target weight.
Nice job, looking forward to the next installment! The capability of these low cost devices is impressive. For barrel vibration measurement I found an Arduino program that samples at 20khz, but then learned the laptop microphone port runs at 40khz.
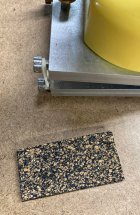
While prepping for the next video, I was tending to the Dandy's missing pads on the base. Thought I had some but couldn't find any. Have a reel of this stuff so I stuck 2 pieces together and put that under the Dandy. That cut the noise down by a LOT but it didn't trickle very well. Maybe it was noisy because I'm missing those 2 pads. I guess the vibration was damped too much. I then tried putting it under the base and seemed like a good compromise. Reduced the noise somewhat and still trickled fairly well. I'd like to replace those 2 pads though. Home Depot, I guess.
While prepping for part 2, observing scale and trickling behavior, I noticed something. Don't know if my scale (balance) is misbehaving or not. Spoke with an A&D tech and I believe he said there is no spec on how long the scale takes to return to 0 or even if it will. I emailed to get a confirmation/clarification on that but haven't gotten a response yet.
I put a pan on, zeroed it, put 30.00gr of powder in it and started a timer. The scale had been powered up for at least a 1/2 hour. After 4 minutes and 16 seconds it was reading 29.92 gr. I dumped the powder and put the pan back on and it read -.10 gr. Still drifting after more than 1/2 hr? With zero tracking ON if the scale is zeroed it will stay at 0.00 (no weight added).
Resolution of the scale is .02 grains. 1 mg = .0154 grains. That should be .02 on the scale. 2 mg is .0308 grains. I would think that would be .04 on the scale. 3 mg is .0463 grains which rounds to .05 but that can't display so I would think it would be .04 which is the same as 2 mg. So, I can see where the scale would indicate more (or less) than expected with the addition of 1 kernel.
Another thing is it takes the scale (maybe just my scale) some amount of time to decide what it wants to display. I could be trickling VERY slow, the scale will indicate target weight and trickling will stop and a moment later it will increase .02 grains. This could be a rounding issue in combination with the above issue. Don't know. Scale is set to FAST response.
What I DO know is I couldn't shoot the difference of 1 kernal of powder (unless they were the size of those used in the 16" guns).
This Forum's expenses are primarily paid by member contributions. You can upgrade your Forum membership in seconds. Gold and Silver members get unlimited FREE classifieds for one year. Gold members can upload custom avatars.










") ). I already have an FX120i and a Dandy so I thought about designing a trickler control myself. Used an Arduino Mega 2560 (copy) with a touchscreen and a communication & motor control board that I designed (I included a switch so it can use a straight through or null modem cable). Then came the code! After that I had to learn SolidWorks to design a box to put it in. I know I could have bought something but this is more fun and kept my mind busy between the frustrations.
). I already have an FX120i and a Dandy so I thought about designing a trickler control myself. Used an Arduino Mega 2560 (copy) with a touchscreen and a communication & motor control board that I designed (I included a switch so it can use a straight through or null modem cable). Then came the code! After that I had to learn SolidWorks to design a box to put it in. I know I could have bought something but this is more fun and kept my mind busy between the frustrations.